
Estrategias de control empleadas en edificios inteligentes
28 octubre 2020 por Sergio Durán
Los edificios son centros recurrentes para la ejecución de las actividades de la vida cotidiana: hogares, oficinas, hospitales, centros de ocio y otros. Estas construcciones, para prestar un servicio de calidad con el objetivo de satisfacer nuestras necesidades de confort y proveer la disponibilidad de equipos para las actividades de distintas índoles dentro de la instalación, ocasionan un alto consumo de energía.
La Agencia Internacional de Energía (IEA) reporta que los edificios y el sector de la construcción consumen un tercio de la energía y son responsables de producir alrededor del 40 % de las emisiones de CO₂ a nivel mundial; asimismo, indica que el sector continúa en aumento requiriendo cada vez más energía [1].
En los últimos años se han implementado construcciones con mecanismos para la automatización de los sistemas de climatización, iluminación, seguridad, multimedia y telecomunicaciones de forma remota e integrada, con la finalidad de aumentar la eficiencia energética y la usabilidad: los populares edificios inteligentes.
Para lograr el nivel de automatización óptimo, es necesario aplicar correctamente las estrategias de control para cada uno de los sistemas. A continuación se revisan las más comunes en el sector de la construcción de edificios inteligentes.
Control ON/OFF
La estrategia de control ON/OFF, como su nombre lo indica, varía entre dos estados: encendido y apagado. Es un tipo de control simple y de baja precisión; su principio de funcionamiento se basa en especificar un valor de referencia y poseer retroalimentación de la planta (proceso).
Mientras la variable de retroalimentación esté por debajo de la referencia, el controlador enciende la planta; cuando está por encima, la apaga. Este comportamiento ocasiona que la salida del sistema termine oscilando. Esta estrategia es la opción más económica y generalmente se utiliza para los sistemas de control de temperatura.
En esta estrategia resulta conveniente considerar el valor de referencia como una banda de referencia, reduciendo la oscilación del sistema en altas frecuencias y evitando causar daños en los equipos. Asimismo, es adecuado considerar la histéresis que poseen algunos sensores mecánicos, que modificaría la amplitud y frecuencia de la oscilación.
La histéresis es un fenómeno que presentan algunos materiales para mantener o "recordar" su estado anterior; en esta estrategia de control se entiende como una diferencia entre el tiempo de encendido y el tiempo de apagado del proceso, lo que incrementa el período de oscilación. Sin embargo, si se requiere que la salida del sistema de control sea un valor constante, es mejor considerar otras estrategias.
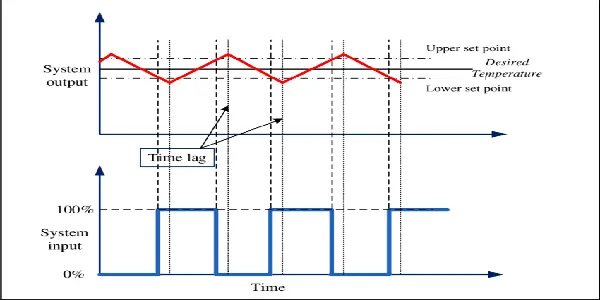 Comportamiento oscilatorio típico de un sistema de control ON/OFF.
Comportamiento oscilatorio típico de un sistema de control ON/OFF.
Control proporcional
El control proporcional es otra técnica ampliamente usada. Al igual que en el caso anterior, se trata de un sistema con retroalimentación; su principio de funcionamiento consiste en amplificar la señal de error con una ganancia variable para regular la planta a un valor de referencia establecido.
En un edificio inteligente se aplica típicamente para sistemas de regulación en el llenado/vaciado de un tanque de agua o, al igual que en el caso anterior, en sistemas de control de temperatura. Matemáticamente se representa como:
Y(t) = Kp * e(t)
Controlador PID
El controlador PID (proporcional, integrativo y derivativo) es una modificación optimizada de la estrategia de control anterior; es un lazo con retroalimentación que permite regular la variable de producción con bastante precisión. Esta estrategia de control es la más usada en la industria.
En el sector de la automatización sus principales aplicaciones son el control de la iluminación artificial dinámica con la luz natural, la regulación de la temperatura y el control de la velocidad del aire en los sistemas de climatización, el control de los sistemas de bombeo y el control de temperatura en los sistemas de calefacción de agua.
El principio de funcionamiento se basa en calcular la diferencia entre el valor de referencia y la entrada de retroalimentación, propiciando un valor de ajuste para mantener la planta en un valor constante. Su expresión matemática es:
Y(t) = Kp*e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt
Término proporcional
El término proporcional es el encargado de representar la diferencia entre el valor real y el valor deseado, e intenta minimizar el error del sistema. El ajuste de este término se hace mediante la variación de la constante Kp.
Incrementar su valor aumenta la velocidad de respuesta del sistema, disminuye el error en régimen permanente y aumenta la inestabilidad del sistema. El término proporcional no considera las variaciones en el tiempo; por lo tanto, la manera óptima de corregir la inestabilidad es alterando los términos integrativos y derivativos.
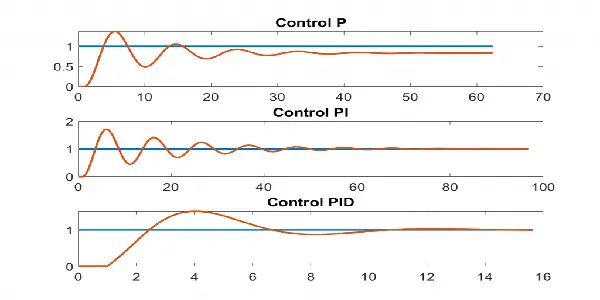 Respuesta típica del controlador PID con los tres términos activos.
Respuesta típica del controlador PID con los tres términos activos.
Término integral
El término integral representa el tiempo que se requiere para realizar la acción correctiva; como su nombre lo indica, va acumulando las señales de error e incrementando el valor de la acción integrativa.
Variando la constante Ki se puede ajustar la acción integrativa en el sistema: cuando esta aumenta, disminuye el error en régimen permanente, aumenta la inestabilidad del sistema y aumenta levemente la velocidad del sistema.
Término derivativo
El término derivativo predice la velocidad a la que cambia el error del sistema e inicia una acción oportuna. En los casos anteriores no se toma en cuenta la inercia de los movimientos, lo que causa que en los sistemas de control proporcionales y proporcionales-integrativos se presenten sobrepicos y oscilaciones.
En pocas palabras, el término derivativo reconoce la velocidad a la que se acerca el valor real al valor de referencia para disminuir los cambios y evitar los sobrepicos. Al aumentar la constante Kd también se aumenta la estabilidad del sistema, disminuye levemente la velocidad del sistema y no altera el error de estado estacionario.
Limitantes en sistemas reales
En los sistemas reales es posible encontrarse con limitantes para el ajuste de la respuesta del controlador. Por ejemplo, en un sistema de calefacción de agua de un edificio, la resistencia tiene una capacidad máxima de 1500 W; si se aumenta sucesivamente la constante proporcional para incrementar la velocidad de respuesta del sistema, el controlador se satura, ya que la resistencia del calentador no puede superar su potencia límite.
Por lo tanto, al momento de modelar un controlador PID es necesario conocer las condiciones reales del sistema a controlar.
Sergio Durán Ingeniero de Desarrollo sduran@innotica.net · LinkedIn